Advancing Low-Altitude Agricultural UAV Operations: Plug-and-Play Device for Sensing and Obstacle Avoidance
Accepted at International Conference on Sensing, Control and Automation Technologies for Agriculture - AGRICONTROL 2025
Mar 2, 2025

Applied for Patent of the Obstacle Avoidance Project completed at TIH-IoT, IIT Bombay
Developed a sense and avoid stack specifically for Low Altitude scenarios
Jul 31, 2024

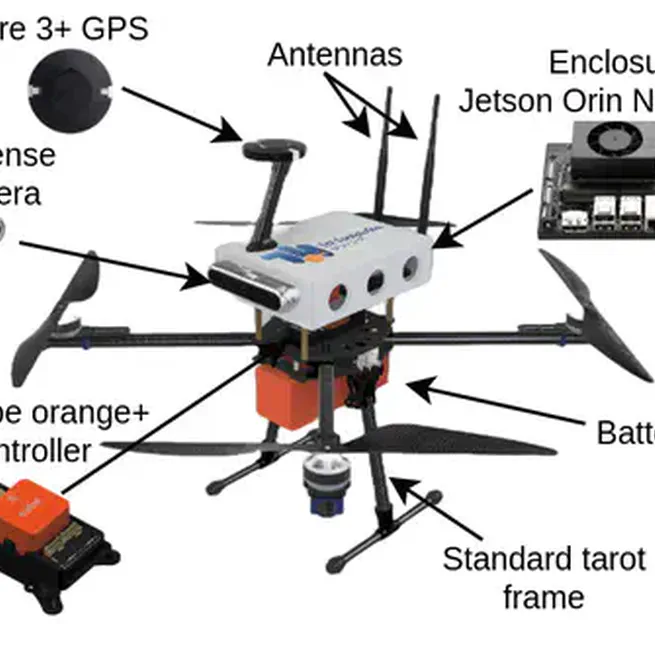
Obstacle detection and collision avoidance for multi-rotor UAV
Drones are actively used in precision agriculture with one of its major applications of spraying pesticides, herbicides, fertilizers, etc. in the agricultural field. The aim of this project is to develop a reliable sense and avoid technology to make UAV-based spraying completely autonomous. The major challenge in achieving autonomy is the requirement of flying low in an agricultural environment with lots of obstacles like trees, poles, cables, etc. As an engineer at TIH, IIT-Bombay, I worked on the development of a robust obstacle detection and avoidance suite capable of navigating through common obstacles in the agricultural field. The figure below displays the functioning of our sense and avoidance technology. In collaboration with General Aeronautics (GA), Bangalore, we tested our technology on different scenarios. * Trees of different shapes and sizes * Detection and avoidance at different heights, * Detection and avoidance for multiple obstacles. We have successfully tested our implementation in the presence of dust and high winds. Currently, we are working towards modifying the avoidance algorithm to maximize spraying in the marked area in the agricultural field.
Jul 28, 2024
Vitarana Drone - Disaster Management
e-Yantra Robotics Competition (2020) Project: Autonomous Drone for Parcel Delivery This was a national-level e-Yantra Robotics Competition, where we were challenged to develop a drone capable of delivering parcels across a city—a fascinating and complex problem. Project Overview We explored drone control and navigation through simulations, focusing on improving efficiency and safety for urban deliveries. Utilizing ROS (Robot Operating System) and the Gazebo simulator, I integrated algorithms to tackle issues like drone crashes and delivery speed optimization. Development Process Obstacle Avoidance: Extended and implemented an obstacle avoidance algorithm to navigate the drone safely through urban environments filled with buildings and bridges. Delivery Scheduling: Developed a scheduling algorithm to optimize delivery times, enhancing the drone’s ability to deliver more parcels in less time. Simulation and Testing: Conducted extensive tests in simulated environments to ensure reliable navigation and successful delivery performance. *Achievements Our optimized system significantly outperformed many other teams, placing us in the top 20 out of 350 national competitors. This project was a key learning experience in drone control, real-time problem-solving, and teamwork. Project Code: Click here to view our work
Feb 10, 2021