Acti-V-Link - An Active Surface, Visual Feedback Based, Mechanically Underactuated Gripper for In-Hand Manipulation
Aug 21, 2024·
 ,
,
·
1 min read
,
,
·
1 min read
Karthik Swamination
Mohammed Saad Hashmi
Mohammed Alqama Shaikh
Vikas M Phalle
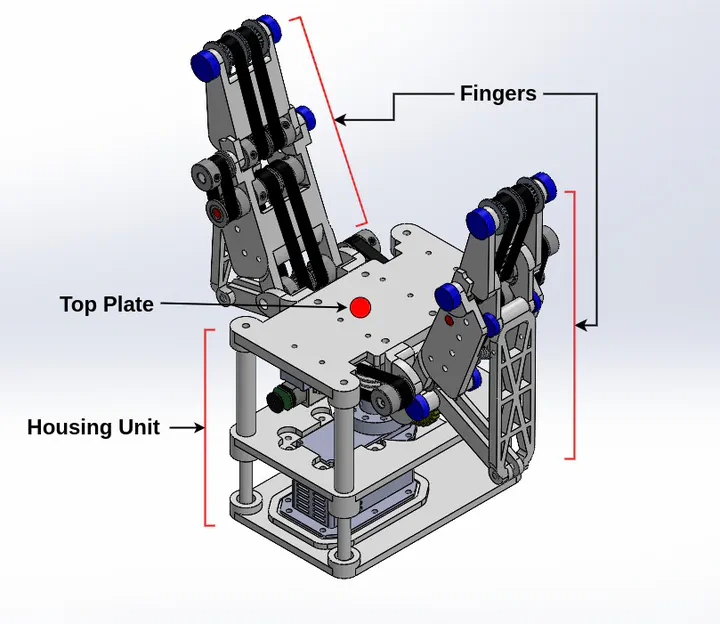 Gripper Isometric View
Gripper Isometric View
Abstract
End-effectors in a robotic system generally have the role of executing operations related to manipulating and handling the objects. The traditional grippers are restricted to the scope of performing a specific task, which limits their capability of adapting to changes in the physical properties of the objects. The grippers can become more efficient when integrated with a sub-system catering to manipulating varied-sized objects within the existing gripper workspace. Many state-of-the-art methods have used tendon-based and active surface (belt-driven) actuation techniques to effectively change the pose of a wide range of objects within the gripper (in hand). We propose the design of a gripper system that leverages the role of an active surface-based actuation technique integrated with an underactuated linkage mechanism capable of performing complex manipulations. We have curated an object list, all having different shapes, and executed experimental rotation and translation of objects. We take the help of vision-based feedback to accurately execute targeted goal pose motion and additionally demonstrate the gripper’s response to mechanical stresses (through analysis) and grasping an object through torque feedback.
Type
Publication
In Proceedings of the 2024 4th International Conference on Robotics and Control Engineering 2024, Edinburgh, UK
Add the publication’s full text or supplementary notes here. You can use rich formatting such as including code, math, and images.