Advancing Low-Altitude Agricultural UAV Operations: Plug-and-Play Device for Sensing and Obstacle Avoidance
Mar 2, 2025·
,
,
,
,
,
·
0 min read
Dimple Bhuta
Mohammed Saad Hashmi
Sanket Bhegde
Zafar Shaikh
Hemendra Arya
Arpita Sinha
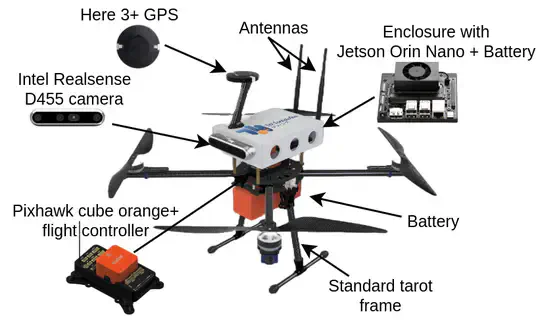 Hardware Description of the Setup
Hardware Description of the Setup
Abstract
This paper introduces a lightweight framework designed to enhance UAV operations for low-altitude flying in agriculture fields. Farmlands are often filled with obstacles such as trees, structures, and poles, which can be dangerous when flying low. To address this challenge, the proposed system combines depth data from RGB-D camera with an IMU to generate LiDAR-like data, ensuring seamless integration with any range sensor-based avoidance algorithms. The entire perception and processing stack runs on the sense-and-avoid module, which can be easily mounted on MAVLink compatible flight controller. This allows the UAV to detect and avoid obstacles in real time, transitioning from semi-autonomous to fully autonomous flight control. By minimizing yaw during navigation, the system ensures both energy efficiency and stability, using only 40 % of the onboard processor, leaving room for the integration of additional functionalities, such as aerial spraying, data collection, etc. The effectiveness of the system was validated through simulations and real-world tests, showing reliable performance in diverse agricultural settings. This vehicle-agnostic sense-and-avoid technology has broad applications in agriculture, surveillance, and disaster relief, improving UAV navigation in obstacle-dense environments.
Type
Publication
Accepted at IFAC AGRICONTROL 2025