Submitted at International Conference on Intelligent Robots and Systems 2025 (IROS)
Accepted at International Conference on Sensing, Control and Automation Technologies for Agriculture - AGRICONTROL 2025
Accepted at International Conference on Robotics and Automation 2025 (ICRA)
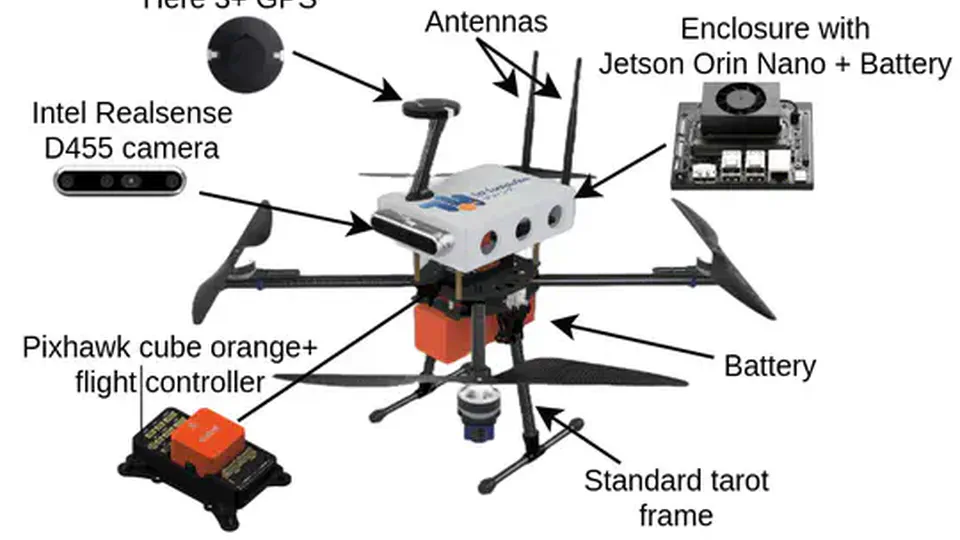
Developed a sense and avoid stack specifically for Low Altitude scenarios
Selected for Spotlight Presentation at the RSS workshop 2024 held at TU Delft
Accepted at 2024 4th International Conference on Robotics and Control Engineering 2024, Edinburgh, UK